O Movimento Circular
Vamos discutir aqui as principais relações entre as variáveis de rotação que serão úteis para o tópico de conservação do momento angular. Com esse objetivo, falaremos primeiro da cinemática do movimento circular e posteriormente da sua dinâmica.
Para facilitar o entendimento das grandezas físicas envolvidas, uma boa parte da análise matemática será feita em cima de uma partícula (corpo de tamanho desprezível) girando em torno de um eixo de rotação fixo ou em movimento retilíneo uniforme. Matematicamente, por enquanto vamos deixar de lado análises de movimentos mais complexos, como por exemplo a rotação do pião. Trata-se de um objeto extenso cujo eixo também gira em relação a uma linha vertical.
Evidentemente, em algum momento precisamos generalizar as fórmulas das novas grandezas para os casos envolvendo movimentos de objetos ou corpos extensos, como a bailarina rotacionando o seu corpo, uma pessoa segurando uma roda de bicicleta sentada numa cadeira giratória, etc.
Cinemática do Movimento Circular
Não há a necessidade de se inventar a roda novamente, com o perdão do trocadilho. Existe um paralelo entre as grandezas cinemáticas de translação com as de rotação; se temos um corpo andando em linha reta, temos a sua posição  , a sua velocidade
, a sua velocidade  e a sua aceleração
e a sua aceleração  . Caso ele esteja girando em torno de um eixo, as grandezas correspondentes a essas variáveis são a posição
. Caso ele esteja girando em torno de um eixo, as grandezas correspondentes a essas variáveis são a posição  , velocidade angular
, velocidade angular  e a aceleração angular
e a aceleração angular 
Evidentemente, para se ter a velocidade (angular) e a aceleração (angular) instantâneas, temos que utilizar a derivada:  , e assim por diante.
, e assim por diante.
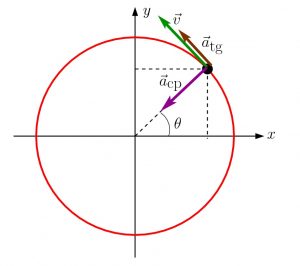
Podemos estabelecer relações entre as variáveis de translação e de rotação. Para isto, considere as figuras abaixo, onde uma partícula puntiforme descreve um movimento circular de raio  .
.
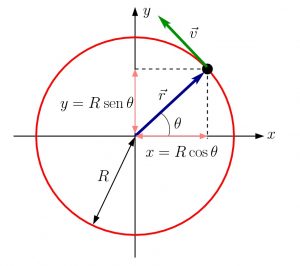
Observamos à direita que
![\[ x = R \cos\theta \qquad \textrm{ e } \qquad y = R\: \textrm{sen}\,\theta \]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-721f94b8f035a66af52d06953704f6c3_l3.png "Rendered by QuickLaTeX.com")
Com a ajuda do cálculo diferencial, podemos derivar e  em relação ao tempo (lembrando que temos que aplicar a regra da cadeia, com
em relação ao tempo (lembrando que temos que aplicar a regra da cadeia, com  ), obtemos as componentes da velocidade
), obtemos as componentes da velocidade  indicada nas figuras. Ela é tangencial à trajetória da partícula (isso sempre é verdade), o que implica que o vetor posição
indicada nas figuras. Ela é tangencial à trajetória da partícula (isso sempre é verdade), o que implica que o vetor posição  e o vetor velocidade são perpendiculares. Isto é uma característica do movimento circular.
e o vetor velocidade são perpendiculares. Isto é uma característica do movimento circular.
Temos que
![\[ v_x = \frac{dx}{dt} = -\omega R\: \textrm{sen}\,\theta \qquad \textrm{ e } \qquad v_y = \frac{dy}{dt} = \omega R \cos\theta \]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-6c469ae5c43a65c3908b77e035a4f30a_l3.png "Rendered by QuickLaTeX.com")
Somando o quadrado de cada termo e extraindo a raiz quadrada, obtemos o módulo da velocidade
![\[ v = \omega R \]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-a97d0a93dadfb38f368efea54b8f4d0a_l3.png "Rendered by QuickLaTeX.com")
Derivando as componentes  e
e  da velocidade, obtemos a aceleração. Para um movimento circular geral, a velocidade angular não é constante, portanto é preciso derivar esse termo também.
da velocidade, obtemos a aceleração. Para um movimento circular geral, a velocidade angular não é constante, portanto é preciso derivar esse termo também.
Temos que

O primeiro termo de  e de
e de  formam a chamada aceleração centrípeta, que é a componente da aceleração na direção radial e que aponta para o centro do círculo:
formam a chamada aceleração centrípeta, que é a componente da aceleração na direção radial e que aponta para o centro do círculo:
![\[ a_\textrm{cp} = \sqrt{(-\omega^2 R \cos\theta)^2 + (-\omega^2 R \:\textrm{sen}\,\theta)^2} \quad \Rightarrow \quad a_\textrm{cp} = \omega^2 R \]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-dae5b860a3670f4ce5a06f1e1ea741d6_l3.png "Rendered by QuickLaTeX.com")
O segundo termo só existe se  , ou seja, se houve a aceleração angular. Observa-se que se
, ou seja, se houve a aceleração angular. Observa-se que se  , o segundo termo de e possuem o mesmo sinal e só dependem do
, o segundo termo de e possuem o mesmo sinal e só dependem do  . Similarmente, o segundo termo de e têm o mesmo sinal e dependem do
. Similarmente, o segundo termo de e têm o mesmo sinal e dependem do  . Ou seja, esses dois vetores são paralelos. Por isto, são componentes da aceleração tangencial (após substituir
. Ou seja, esses dois vetores são paralelos. Por isto, são componentes da aceleração tangencial (após substituir  por ):
por ):
![\[ a_\textrm{tg} = \sqrt{(-R\alpha \: \textrm{sen}\,\theta)^2 + (R \alpha \cos\theta)^2} \quad \Rightarrow \quad a_\textrm{tg} =R \alpha \]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-48525229ee5876cf5bce4c6dde6c85dc_l3.png "Rendered by QuickLaTeX.com")
O vetor velocidade angular
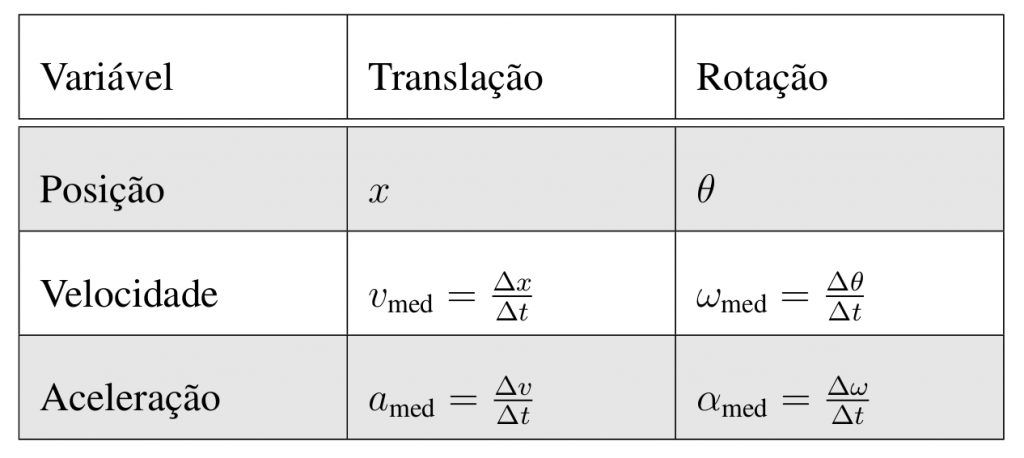
Na tabela acima, relacionamos as variáveis de rotação às variáveis de translação unidimensionais. No entanto, em movimentos gerais, falamos de vetores posição , velocidade e aceleração  . Numa situação geral,
. Numa situação geral,  e são também grandezas vetoriais?
e são também grandezas vetoriais?
Tratamos essas últimas grandezas como variáveis escalares, pois o eixo de rotação permanece fixo. Com isto, a noção de direção e sentido são dados pelo sinal de : positivo, se a partícula gira no sentido anti – horário ( cresce) e negativo se gira no sentido horário ( decresce).
Em situações gerais, quando o eixo de rotação não permanece fixo, é interessante introduzirmos o vetor velocidade angular, assim como a aceleração angular.
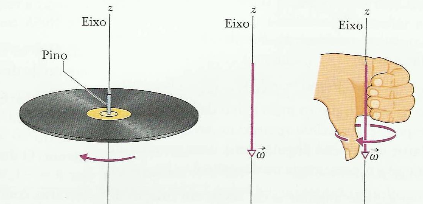
A direção de  da partícula está na direção do eixo no qual ele gira em torno. O sentido é dado pela chamada “regra de mão direita”, que introduzimos para achar o sentido da força magnética .
da partícula está na direção do eixo no qual ele gira em torno. O sentido é dado pela chamada “regra de mão direita”, que introduzimos para achar o sentido da força magnética .
Para usar a regra da mão direita, considere um disco (de vinil!) girando. O sentido de é dado pelo sentido do polegar, quando este é posicionado na direção do eixo de rotação e os demais dedos seguindo o sentido da rotação. Na figura abaixo, onde o disco gira no sentido horário (visto de cima), está na direção  e aponta para baixo. Se o sentido de rotação do disco fosse invertido, apontaria para cima.
e aponta para baixo. Se o sentido de rotação do disco fosse invertido, apontaria para cima.
Não é muito intuitivo associar a direção de ao eixo de rotação. Mas ela é decorrente da definição do vetor deslocamento angular infinitesimal  , que é ao longo do eixo de rotação. Infinitesimal, porque estamos tratando de uma rotação contínua, onde o ângulo muda muito pouco num intervalo de tempo muito pequeno.
, que é ao longo do eixo de rotação. Infinitesimal, porque estamos tratando de uma rotação contínua, onde o ângulo muda muito pouco num intervalo de tempo muito pequeno.
O Movimento Circular Uniforme
Um caso particular do movimento circular ocorre quando a velocidade angular é constante, ou seja,  . Neste caso, as equações derivadas acima continuam a valer, mas agora a aceleração centrípeta é a aceleração total (resultante) da partícula.
. Neste caso, as equações derivadas acima continuam a valer, mas agora a aceleração centrípeta é a aceleração total (resultante) da partícula.
Mas se é constante e portanto  também é constante, porque a partícula está acelerada? A resposta é que o vetor velocidade não é constante: a direção muda conforme a partícula descreve um caminho circular. A aceleração centrípeta se deve à mudança na direção de e não do seu módulo!
também é constante, porque a partícula está acelerada? A resposta é que o vetor velocidade não é constante: a direção muda conforme a partícula descreve um caminho circular. A aceleração centrípeta se deve à mudança na direção de e não do seu módulo!
Se o vetor velocidade está mudando, evidentemente a partícula possui uma aceleração não nula. Pela segunda lei de Newton, deverá haver uma força responsável por essa aceleração.
Na próxima seção trataremos da força e de novas grandezas introduzidas para descrever a dinâmica de rotações. Além dos momento angular, introduziremos o torque e o momento de inércia.
Dinâmica do Movimento Circular
Similarmente à existência de correspondência entre variáveis cinemáticas de translação e rotação, há a correspondências entre as variáveis dinâmicas entre esses dois tipos de movimento. Na translação, temos a força, o momento linear e a massa, que desempenham um papel importante na descrição da dinâmica do movimento.
As grandezas equivalentes para o movimento circular são , respectivamente, o torque, o momento angular e o momento de inércia.
Com as discussões que iremos realizar, ficará claro o significado dessas novas grandezas introduzidas para descrever a dinâmica do movimento circular.
Torque
É comum utilizarmos a palavra “força” no nosso cotidiano, inclusive para se referir a algo não necessariamente igual à grandeza  , definida na física.
, definida na física.
Já o torque é muito pouco usado no nosso dia-a-dia. Talvez mais entre aficionados em carros, por exemplo, que estão atentos quanto ao seu valor num determinado veículo. No caso, o torque é dado em kgf m (quilograma força vezes metro). Como kgf é uma unidade de força (massa em kg vezes a aceleração da gravidade), então o torque tem unidades de força vezes um comprimento.
m (quilograma força vezes metro). Como kgf é uma unidade de força (massa em kg vezes a aceleração da gravidade), então o torque tem unidades de força vezes um comprimento.
Apesar de ser uma quantidade diferente de força, o torque é identificado erroneamente como “força” na linguagem popular. De fato, dizemos que precisamos fazer uma determinada força para abrir uma torneira, empurrar uma porta pesada, soltar ou apertar um parafuso, etc.
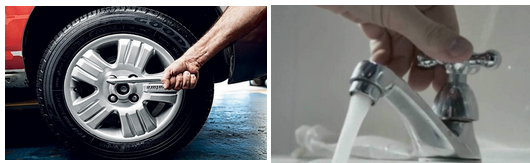
Conforme veremos adiante, em todos esses exemplos a grandeza fundamental para colocar o objeto a girar é o torque.
Mas é mesmo necessário definir uma nova variável para descrever a rotação de um objeto? Não seria o suficiente falarmos apenas da força?
Embora não costumamos parar para pensar, o senso comum diz que a força a ser aplicada é importante, mas como e onde aplicá-la também. Isso, de certa forma, é bastante intuitivo no nosso dia-a-dia. Por exemplo, é importante em que ponto aplicar uma determinada força para abrir uma porta. Além do local, a direção da força também é igualmente importante.
Experimente empurrar uma porta de duas formas, conforme mostra a figura. É fato que se faz menos força para fechar a porta quando a força é aplicada na maçaneta do que num ponto entre a maçaneta e o seu eixo de rotação.
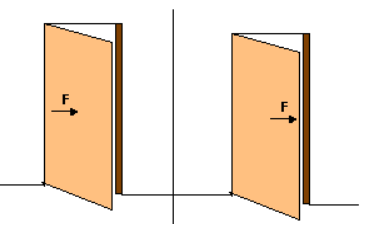
Também é possível concluir que neste caso a força deve ser horizontal e ao mesmo tempo perpendicular à porta.
Para ilustrar a importância da direção da força, considere a situação abaixo onde duas forças de mesma intensidade são aplicadas nas extremidades de um lápis.

Como pela segunda lei de Newton,
![\[ \vec{F}_\textrm{res} = \vec{F}_1 + \vec{F}_2 = 0 \]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-c6b16caa3542a39a56eba9df3ef3fbef_l3.png "Rendered by QuickLaTeX.com")
o lápis não terá aceleração e portanto, se estivesse inicialmente em repouso, essas forças não conseguem mover o lápis.
Vamos agora mudar as orientações das duas forças, passando agora para a situação ilustrada abaixo:
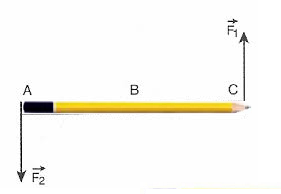
Mesmo nesta nova situação, a força resultante continua sendo nula. No entanto, a experiência mostra que o lápis começa a girar. Como  , o centro de massa do lápis permanecerá em repouso, portanto o que ocorre é que o lápis começa a girar em torno do centro de massa (localizado no ponto B na figura acima).
, o centro de massa do lápis permanecerá em repouso, portanto o que ocorre é que o lápis começa a girar em torno do centro de massa (localizado no ponto B na figura acima).
A partir dos exemplos acima, podemos agora definir matematicamente o que é a grandeza torque.
Considere uma força aplicada a um ponto  de uma barra pivotada em torno do ponto
de uma barra pivotada em torno do ponto  (o eixo passa por esse ponto e é perpendicular ao plano da tela). A posição de é dada pelo vetor , que tem origem no ponto , conforme mostra a figura abaixo:
(o eixo passa por esse ponto e é perpendicular ao plano da tela). A posição de é dada pelo vetor , que tem origem no ponto , conforme mostra a figura abaixo:
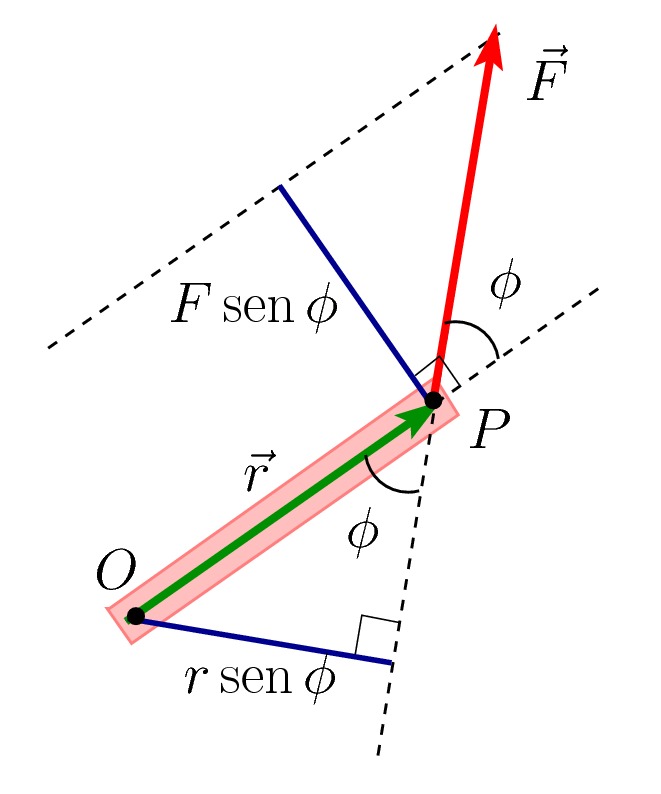
Definimos torque em em relação a como sendo
![\[ \tau = |\vec{r}| |\vec{F}| \,\textrm{sen}\,\phi = |\vec{r}| F_\perp \]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-7ef17ba3b24e9e275a3029e9ecbbce72_l3.png "Rendered by QuickLaTeX.com")
ou seja, somente a componente da força perpendicular a ,  contribui para o torque. Por outro lado, podemos escrever a equação acima como
contribui para o torque. Por outro lado, podemos escrever a equação acima como
![\[ \tau = (r\,\textrm{sen}\,\phi ) F \]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-d17d55d74723a21bec81b7e07b736f4b_l3.png "Rendered by QuickLaTeX.com")
Chamamos de braço de alavanca a grandeza  , que é a distância entre o ponto e a linha de ação da força .
, que é a distância entre o ponto e a linha de ação da força .
Como o torque é força vezes comprimento, a sua unidade de medida no SI é newton vezes metros (Nm).
O torque gerado faz com que a barra gire no sentido anti-horário.
O torque também é uma grandeza vetorial. A sua direção coincide com a direção do eixo de rotação. Já o sentido é dado também pela regra da mão direita, da mesma forma que determinamos a força magnética de uma carga em movimento na seção Trabalho e Forças Conservativas.
Só que aqui, com a mão direita, faz-se um movimento dos quatro dedos levando o vetor para o vetor . O sentido do polegar dá o sentido do torque.
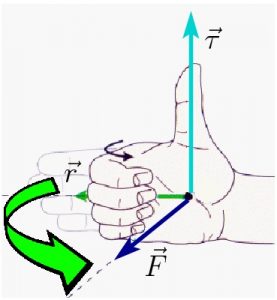
Se o torque resultante tiver o sentido indicado na figura acima, significa que o corpo vai girar no mesmo sentido dos quatro dedos. Para quem vê de cima, o sentido é anti-horário.
Na figura abaixo, o torque também é para cima. Observe que para usar a regra da mão direita, é preciso que a “traseira” dos dois vetores precisam estar juntos. Lembre-se que um vetor pode ser sempre “transportado”, desde que o seu tamanho e a sua orientação permaneçam inalterados.
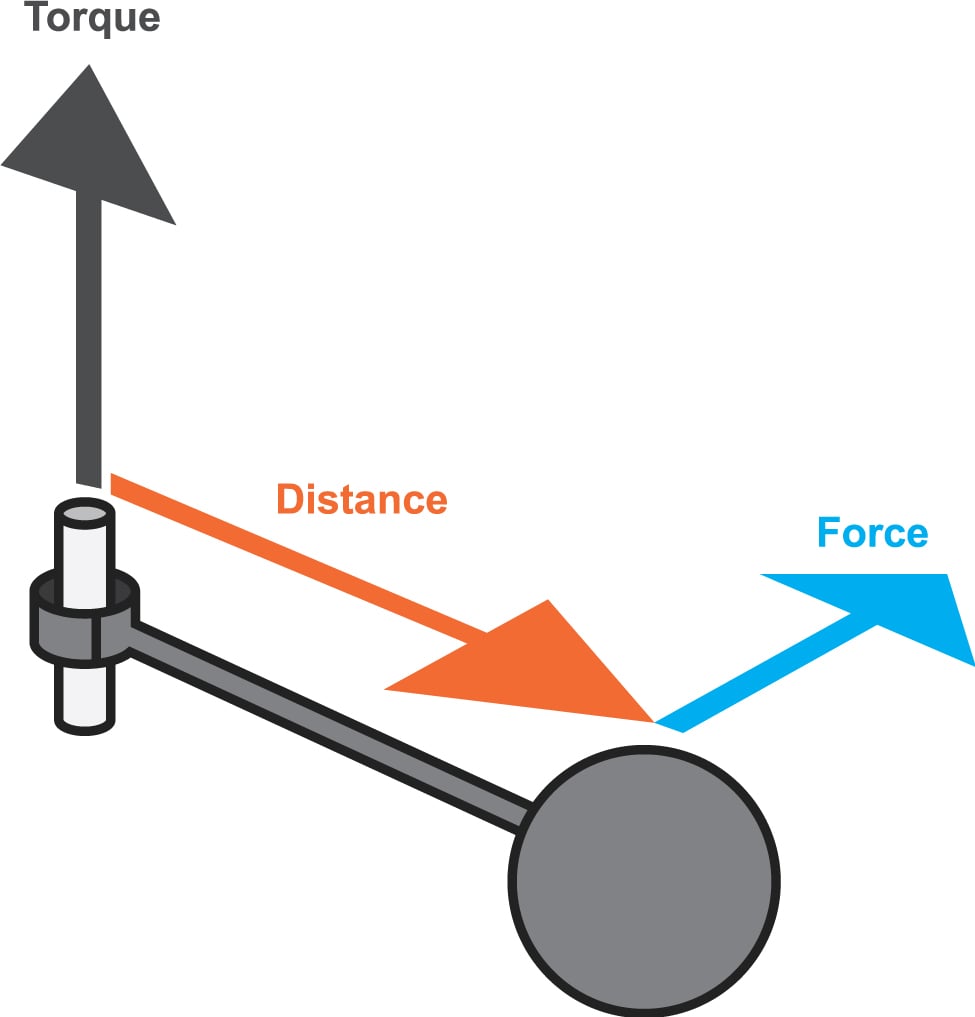

Voltando ao exemplo da porta, agora podemos entender porque ao aplicar uma força mais distante do eixo de rotação teremos mais facilidade para abri-la; de acordo com a definição de torque, quando mais distante for o ponto de aplicação da força em relação ao eixo, maior será o torque. Na figura abaixo, para se ter o mesmo torque,  precisa ser maior do que
precisa ser maior do que  .
.

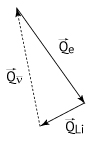
Em relação ao exemplo do lápis sob ação de forças verticais, observamos que ambas as forças produzem torque no mesmo sentido. Se definirmos os vetores posição  , que tem origem em
, que tem origem em  e vai até
e vai até  , obtemos o torque
, obtemos o torque  devido à força
devido à força  . Similarmente, obtemos o torque
. Similarmente, obtemos o torque  . Ambos os torques apontam para fora da tela. Logo, o movimento do lápis será anti-horário.
. Ambos os torques apontam para fora da tela. Logo, o movimento do lápis será anti-horário.
Intuitivamente, associamos o torque como sendo a causa da rotação. Mas o que ele está fazendo ao corpo exatamente. Para isto, vamos voltar à cinemática do movimento circular discutido acima. Nós introduzimos a aceleração tangencial  , cuja direção, como o próprio nome sugere, é tangencial à direção do movimento. Recordamos que o seu módulo é dado por
, cuja direção, como o próprio nome sugere, é tangencial à direção do movimento. Recordamos que o seu módulo é dado por
![\[ a_\textrm{tg} = r \alpha \]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-e636fce34ac443cc23ab6cf08b2ffba0_l3.png "Rendered by QuickLaTeX.com")
onde  é a aceleração angular. Se o objeto possuir uma massa
é a aceleração angular. Se o objeto possuir uma massa  , essa aceleração se deve à força que age sobre ele e portanto
, essa aceleração se deve à força que age sobre ele e portanto
![\[ F_\perp = m a_\textrm{tg} = m r \alpha\]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-ef175940f67becfebeea6d8968fa29d3_l3.png "Rendered by QuickLaTeX.com")
por outro lado,  , portanto
, portanto
![\[ \tau = mr^2 \alpha \]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-a0b08a4d32009bfb0f807f37721f3236_l3.png "Rendered by QuickLaTeX.com")
ou seja, o torque causa a aceleração angular do corpo.
Aqui entendemos o paralelo entre a força (variável de translação) e o torque (variável de rotação). Força diferente de zero produz uma aceleração; torque diferente de zero produz uma aceleração angular.
De acordo com a segunda lei de Newton, a massa é a responsável pela inércia do corpo. Quanto maior, menor a resposta do corpo para a força aplicada.
Se seguirmos esse raciocínio, identificamos a quantidade  como sendo algo equivalente à inércia do corpo. De fato, para uma partícula de massa descrevendo um movimento circular de raio
como sendo algo equivalente à inércia do corpo. De fato, para uma partícula de massa descrevendo um movimento circular de raio  , o termo é chamado de momento de inércia da partícula em relação a esse eixo e é identificado com a letra
, o termo é chamado de momento de inércia da partícula em relação a esse eixo e é identificado com a letra  .
.
Temos portanto que
![\[ \tau = I \alpha \]](https://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-fb58d4a5bcce0324c110b5a8263c04b5_l3.png "Rendered by QuickLaTeX.com")
Esta expressão é conhecida como sendo a segunda lei de Newton para a rotação.
No caso de uma partícula, identificamos  como sendo o momento de inércia. A pergunta é: como é o momento de inércia de um objeto extenso. Por mais que ele seja simples, como um lápis pivotado em seu centro de massa, o que seria na fórmula do momento de inércia? E para objetos mais complicados?
como sendo o momento de inércia. A pergunta é: como é o momento de inércia de um objeto extenso. Por mais que ele seja simples, como um lápis pivotado em seu centro de massa, o que seria na fórmula do momento de inércia? E para objetos mais complicados?
A seguir, vamos indicar como o momento de inércia de objetos extensos podem ser calculados, ou pelo menos, entendido de forma qualitativa.
Ir para a página Momento de Inércia de Objetos Extensos
")
")
 de um objeto simples é:
de um objeto simples é:![\[ I=mr^{2} \]](http://leis-de-conservacao.propg.ufabc.edu.br/wp-content/ql-cache/quicklatex.com-45262fe8527087aa9b4b4d75520124b4_l3.svg "Rendered by QuickLaTeX.com")
 é a massa em quilograma e
é a massa em quilograma e  é a distância do objeto até o eixo de rotação em metros. Assim se a distância entre o objeto e o eixo de rotação diminui, o momento de inércia diminui, por isso que ao encolher os braços e as pernas o atleta gira mais rápido.
é a distância do objeto até o eixo de rotação em metros. Assim se a distância entre o objeto e o eixo de rotação diminui, o momento de inércia diminui, por isso que ao encolher os braços e as pernas o atleta gira mais rápido.